
ロボットプログラミング教室の授業紹介(2)
前回、紹介させてもらいましたロボットプログラミング教室の授業についての第2回について説明させてもらいます。
前回は、基礎編としてロボットの基本的な仕組みやプログラムの作成をテキストに沿って勉強する所まで紹介したと思います。
そこまでできた子は次に応用編として、発展課題やミッションという方でさらに理解を深めていきます。
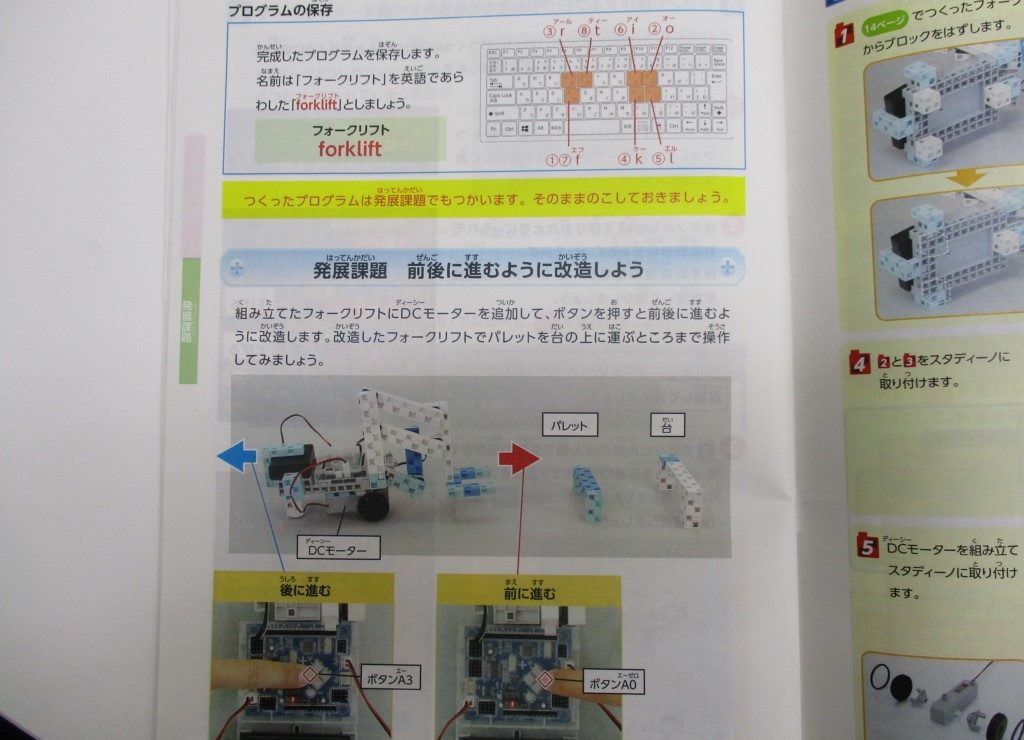
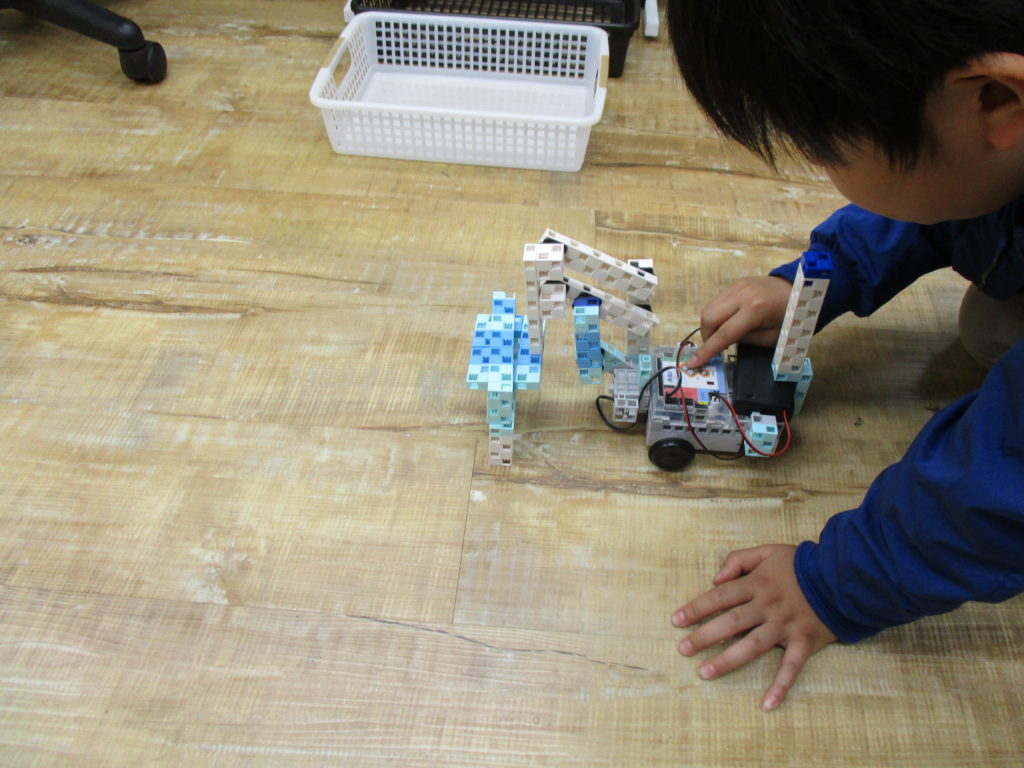
今回説明させてもらっている”フォークリストをつくろう”では、前回作成したフォークリストに対して、タイヤを追加し、ボタン操作で前や後に移動できるように変更しました。

発展課題までできた子は、さらに応用として、ミッション(課題)に取り組み自分で考えロボットを作成していくことになります。
ミッションは自分で考えてロボットの改造や、プログラムの作成を行うことになります。
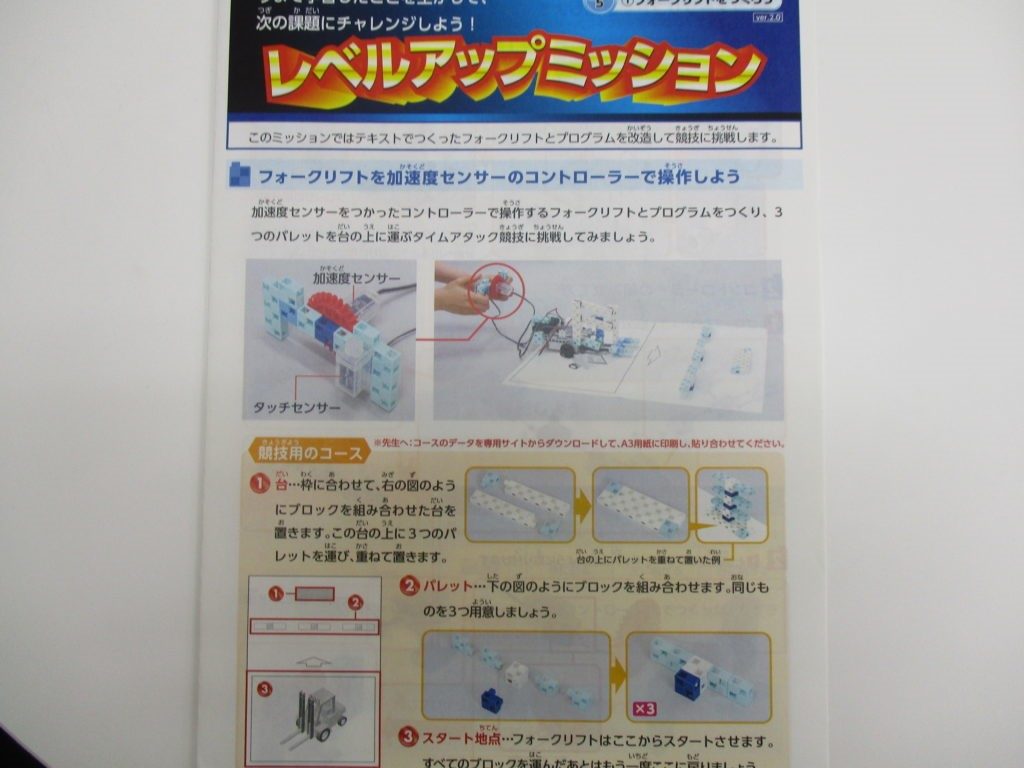
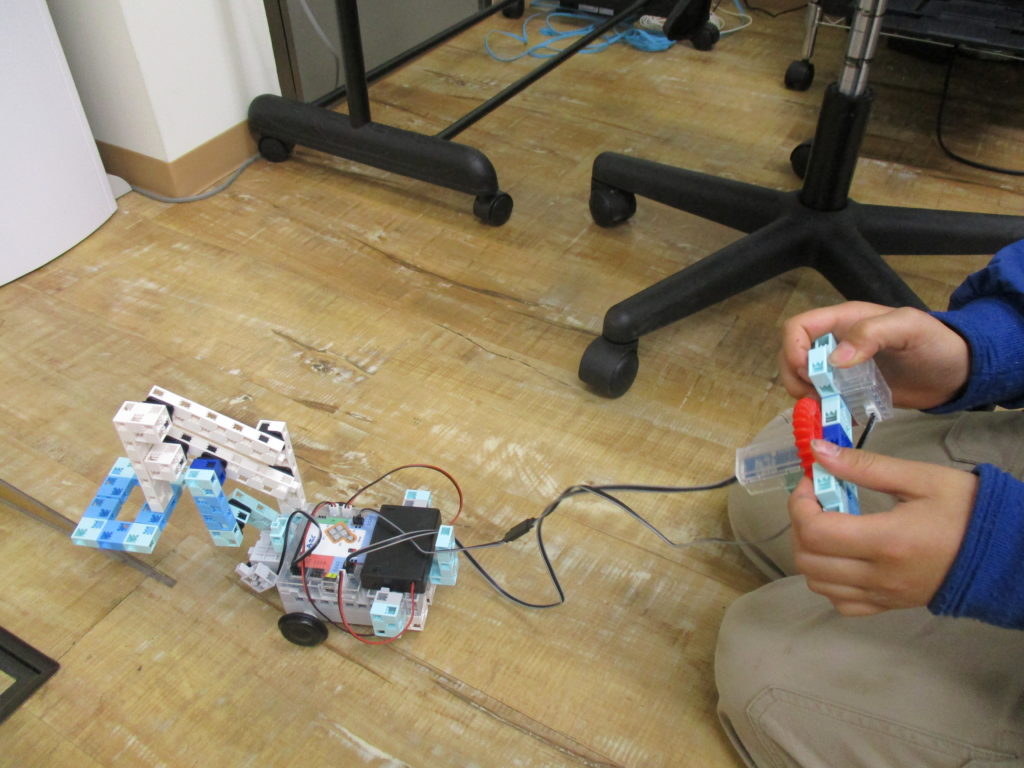
今回の例では、加速度センサーを用いたコントローラー作成し、フォークリストを前後左右に動くことができるように改造するというものでした。
ここまではテキストの説明通りに作成すればよかったのですが、ミッションでは自分で考えながら挑戦しなければならないため、子供たちは試行錯誤しながら取り組むことになります。
難易度としては上がるのですが、ミッションはゲーム感覚なものになっているので、楽しみながらロボットやプログラムに対する知識を深めていくことができます。

前回が基礎編となり今回が応用編となります。これが1カリキュラムとなり、毎月異なるカリキュラムに取り組み勉強をしていくことになります。
ロボットプログラミング教室の流れはこのようになっております。もしご興味がありましたらお気軽にお問合せください。
また機会がありましたら、別のカリキュラムについても紹介できればと思っております。

久米川駅より徒歩2分・東村山市のパソコン教室。
キュリオステーション久米川店
詳しくはこちら
キュリオステーション久米川店